
كشف مجموعة من الباحثين عن اختراع روبوت جديد على شكل ذراع في نهايته اربع اصابع تشبه اصابع الانسان قادر على استيعاب المسارات المعقدة للاشياء في اقل من خمسة في المئة من الثانية .
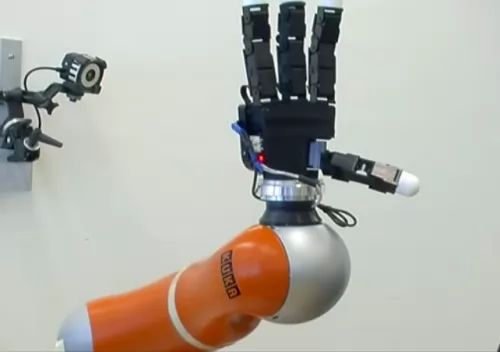
الروبوت الذراع الجديد طوله 1.5 متر ويظل في وضع رأسي ومصمم من ثلاثة مفاصل وفي نهاية ذلك الذراع يد مكونة من اربع اصابع تشبه اصابه الانسان وهذا الروبوت الذراع قادر على التقاط الاشياء المقذوفة والمتحركة في الهواء من مسارات مختلفة ، حيث يتمكن الروبوت الذراع من تحديد وتوقع مسار الاشياء المقذوفة في اقل من خمسة في المئة من الثانية الواحدة .

ويقول اودي بليارد رئيس مختبر خوارزميات التعلم ونظم لاسا ان التفكير في تصميم روبوت المستقبل يعتمد على ادائه لمهام مختلفة موجودة في حياتنا اليومية فليس فقط مطلوب عمل روبوت قادر على الاستجابة على الفور ولكن يستطيع التنبؤ ايضا بمسارات الاشياء المتحركة وتوليد حركة في الاتجاه المعاكس .
ويقول العلماء ان ذلك الروبوت الذراع سوف يتم تطويره ليتم استخدامه في الفضاء وسوف يكون جزءا من مشروع تنظيف الفضاء حول الارض الذي يقوم به مركز الفضاء السويسري حيث يهدف المشروع الى جمع والتخلص من الحطام الفضائي الموجود حول الارض ، حيث سيتم تركيب الروبوت الذراع على الاقمار الصناعية وتكون مهمة ذلك الذراع اصطياد الحطام المتطاير حول الارض وذلك عن طريق مراقبة حركة الاجسام وهي تقترب واتخاذ الوضعية المناسبة لالتقاط تلك الاجسام من وضع الحركة .
ولتحقيق تلك القدرات المذهلة للروبوت الذراع استوحي الباحثون اساليب التعلم لدى الانسان من التجربة والخطأ واستخدموا تقنية تسمى البرمجة بواسطة المظاهرة والتي لا يتم اعطاء تعلميات محددة للروبوت ولكن يتم اعمل تجارب للذراع لالتقاط الاشياء عدة مرات ويتم تخزين تلك التجارب حتى يتمكن الروبوت من التحرك المناسب لكل موقف .
روابط إعلانية

ففي خلال مراحل التعلم الاولى القى الباحثون الاجسام الى الروبوت عدة مرات واستخدم الروبوت الذراع الكاميرات المتمركزة حوله لقياس مسار وسرعة الجسم المتحرك ويتم عمل عمليات حسابية سريعة لنقل اليد في الاتجاه الصحيح وفي الوقت المناسب لالتقاط الجسم الطائر
الروبوت الذراع الجديد طوله 1.5 متر ويظل في وضع رأسي ومصمم من ثلاثة مفاصل وفي نهاية ذلك الذراع يد مكونة من اربع اصابع تشبه اصابه الانسان وهذا الروبوت الذراع قادر على التقاط الاشياء المقذوفة والمتحركة في الهواء من مسارات مختلفة ، حيث يتمكن الروبوت الذراع من تحديد وتوقع مسار الاشياء المقذوفة في اقل من خمسة في المئة من الثانية الواحدة .
ويقول اودي بليارد رئيس مختبر خوارزميات التعلم ونظم لاسا ان التفكير في تصميم روبوت المستقبل يعتمد على ادائه لمهام مختلفة موجودة في حياتنا اليومية فليس فقط مطلوب عمل روبوت قادر على الاستجابة على الفور ولكن يستطيع التنبؤ ايضا بمسارات الاشياء المتحركة وتوليد حركة في الاتجاه المعاكس .
ويقول العلماء ان ذلك الروبوت الذراع سوف يتم تطويره ليتم استخدامه في الفضاء وسوف يكون جزءا من مشروع تنظيف الفضاء حول الارض الذي يقوم به مركز الفضاء السويسري حيث يهدف المشروع الى جمع والتخلص من الحطام الفضائي الموجود حول الارض ، حيث سيتم تركيب الروبوت الذراع على الاقمار الصناعية وتكون مهمة ذلك الذراع اصطياد الحطام المتطاير حول الارض وذلك عن طريق مراقبة حركة الاجسام وهي تقترب واتخاذ الوضعية المناسبة لالتقاط تلك الاجسام من وضع الحركة .
ولتحقيق تلك القدرات المذهلة للروبوت الذراع استوحي الباحثون اساليب التعلم لدى الانسان من التجربة والخطأ واستخدموا تقنية تسمى البرمجة بواسطة المظاهرة والتي لا يتم اعطاء تعلميات محددة للروبوت ولكن يتم اعمل تجارب للذراع لالتقاط الاشياء عدة مرات ويتم تخزين تلك التجارب حتى يتمكن الروبوت من التحرك المناسب لكل موقف .
روابط إعلانية
ففي خلال مراحل التعلم الاولى القى الباحثون الاجسام الى الروبوت عدة مرات واستخدم الروبوت الذراع الكاميرات المتمركزة حوله لقياس مسار وسرعة الجسم المتحرك ويتم عمل عمليات حسابية سريعة لنقل اليد في الاتجاه الصحيح وفي الوقت المناسب لالتقاط الجسم الطائر